脚踩式垃圾桶的原理示意图
的有关信息介绍如下: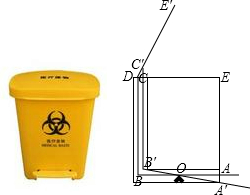
脚踩垃圾桶是费力杠杆
如图所示:
O为支点,A(A')O为动力臂,OB(B')C(C')E(E')为阻力臂
动力臂短于阻力臂,要费更大的力气,所以脚踩垃圾桶是费力杠杆。
杠杆原理
杠杆又分称费力杠杆、省力杠杆和等臂杠杆,杠杆原理也称为“杠杆平衡条件”。要使杠杆平衡,作用在杠杆上的两个力矩(力与力臂的乘积)大小必须相等。即:动力×动力臂=阻力×阻力臂。
费力杠杆
杠杆平衡条件为动力乘动力臂等于阻力乘阻力臂,那么在杠杆平衡的条件下,动力大于阻力,动力臂小于阻力臂时,杠杆为费力杠杆。
省力杠杆
由力的作用线到支点的距离叫做力臂。力臂越长力就越小。省力杠杆,顾名思义,其动力臂较长,动力较小,所以省力。但是通常省力杠杆省了力气会相应的费距离。
拓展资料:
在使用杠杆时,为了省力,就应该用动力臂比阻力臂长的杠杆;如果想要省距离,就应该用动力臂比阻力臂短的杠杆。因此使用杠杆可以省力,也可以省距离。但是,要想省力,就必须多移动距离;要想少移动距离,就必须多费些力。要想又省力而又少移动距离,是不可能实现的。
参考资料:杠杆原理-百度百科